特斯拉车联网安全:挑战与解决方案
摘要: 随着车联网技术的快速发展,特斯拉作为领先的电动汽车制造商,不仅在电动驱动和自动驾驶领域取得了巨大的成功,同时也面临着车联网安全方面的挑战。本论文旨在从物理入侵和视觉干扰两方面探讨特斯拉车联网存在的安全隐患,并尝试提供解决方案,以促进特斯拉车辆和其用户的安全得到充分保护。
关键词: 特斯拉,腾讯科恩,车联网
引言
背景介绍
随着人工智能技术的快速发展,高级辅助驾驶相关技术正在汽车领域逐步落地,同时也吸引了大众的关注。特斯拉是第一个实现整车在线升级(OTA)的车企,颠覆了人们对传统汽车的认识。特斯拉的很多故障不用送到4S店也能远程在线修复,唯一需要的就是保证联网在线。车联网是汽车智能化的重要基础,是让汽车进入汽车互联网时代的必要条件,但成功的背后,也存在着不可忽视的安全隐患。
在2015年8月的黑客大会DEFCON上,安全研究人员Marc Rogers和Kevin Mahaffey在研究过程中以物理入侵的方式控制特斯拉汽车[1];在2018年Black Hat USA大会上,科恩实验室面向全球首次公布了针对特斯拉Autopilot系统的远程无接触攻击,在后续的研究中,科恩实验室重点关注视觉AI模型对抗研究、Autopilot系统架构与网络安全等方面。
研究目的和意义
自动驾驶技术正在快速发展,可以通过物联网和机器学习算法来自动完成各种任务。本文将从物理入侵和视觉干扰两个方面,针对特斯拉的相关漏洞进行分析与思考,旨在探索车联网的安全漏洞并尝试找到其解决方案。
特斯拉车联网安全威胁分析
物理入侵
特斯拉汽车一直受到黑客的关注,很多安全研究人员都尝试挖掘特斯拉的漏洞,主要原因是特斯拉是纯电动汽车并且有网络连接,可以通过网络对汽车进行控制,而且特斯拉本身非常依赖电子控制系统。以特斯拉的以太网接口为例,通过这个接口可以与汽车的娱乐信息系统网络通信,接入信息娱乐系统网络后使用Nmap等工具对内网扫描就可以发现3个设备,一个是CID、一个是IC、另一个是网关。IC和CID上的两个程序ic-updater和cid-updater可以获取诊断信息、上传文件或者固件,这两个程序的大部分命令都有认证保护,但比如status就没有保护,这两个程序在输入status状态命令时会打印出信息娱乐系统的关键信息,包括下载固件的URL。利用OpenVPN配置以及存储卡里的Carkeys.tar,可以与服务器建立VPN连接并下载固件,进行密码破解得到IC的root权限,从而进行车辆控制。

视觉干扰
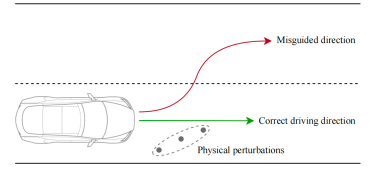
科恩实验室在2019年发布了对Tesla Autopilot的研究,其中一项研究成果实现了对车道线系统的攻击,在路面部署干扰信息后,可导致车辆经过时对车道线做出错误判断,致使车辆驶入反向车道。在2021年,科恩实验室进一步测试现有车道线检测系统的安全性,他们基于黑盒测试和优化算法设计了一种自动化的攻击方法来找到人眼难以察觉,但却可以欺骗车道线检测系统的扰动[2]。在实验阶段,这些扰动被布置在物理世界中,而处于自动驾驶状态的车辆成功被引入了逆向车道,如下图所示。
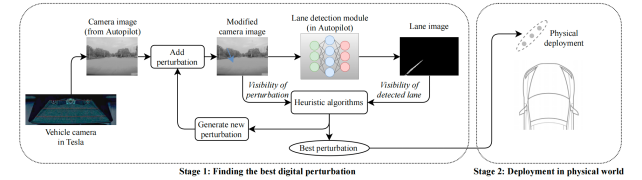
其框架如下图所示:先基于黑盒测试和优化算法在数字图像层面找到最佳扰动 (Stage.1),然后再将该扰动布置到物理世界 (Stage.2)。
特斯拉车联网安全解决方案
物理入侵
车联网的丰富功能给了黑客许多的入侵机会,不过相关漏洞特斯拉已经完成了修复,基于攻击场景与特斯拉的修复方法,本文进行了相关的总结与思考。
首先,特斯拉服务中心的Wi-Fi采用了汽车之间共享的静态密码,如果改为WPA企业认证,这样就不用在汽车之间采用相同的静态密钥;其次,Model S具有非常强的边界安全,但是内网的安全性不高,应该对信息娱乐系统网络进行进一步完善;然后,VPN密钥和安全令牌都以明文的方式存储在文件系统中,如果将这些关键信息存储在硬件安全模块中会更安全;最后,网络上的节点间通信没有加密,所以攻击者可以分析网络上的所有流量,并且只有少部分服务采用了认证机制,为保证安全,任何节点间的通信都应该经过加密和认证。
视觉干扰
虽然该漏洞特斯拉已经完成了修复,但本文认为对抗样本攻击一直是人工智能领域的研究热点,由于神经网络易受数据影响的特点,很难完全保证其识别准确率能一直保持准确。因此在车辆终端侧,应该增加足够的提醒机制,比如按照司机日常的开车习惯存储一套行车指标,如果车辆即将采取的行为与该指标有较大差异,则对用户和相关设备发送消息甚至是警报,保证用户能在存在信息泄露风险时及时保护隐私,并在危险情况时及时接替车辆操控。
总结
本文探究了特斯拉面临的安全挑战,并思考了相关解决方案。不过技术的发展离不开各行各业的支持,随着特斯拉及其他相关企业不断改进其车辆安全性,政府、行业标准组织和学术界也应加强合作,共同完善车联网安全标准和法规,为车联网的可持续发展提供支持。
参考文献
[1] 知乎. 入侵特斯拉——智能汽车安全性分析. [2017-11-06]. https://zhuanlan.zhihu.com/p/30767773.
[2] Jing P, Tang Q, Du Y, et al. Too good to be safe: Tricking lane detection in autonomous driving with crafted perturbations[C]//30th USENIX Security Symposium (USENIX Security 21). 2021: 3237-3254.
 支付宝
支付宝


